Finalising the broken line detect. The resistor is now covered with heatshrink and the G407 AP servo disconnect line is spliced and using the resistor connector to the spliced GND wire.

All these wires will need to be secured as they are positioned underneath the pilot stick. Not sure yet how I will to this. Will zip tie them in a bundle and maybe either using zip mount bases or a small adel clamp on the seat rib.

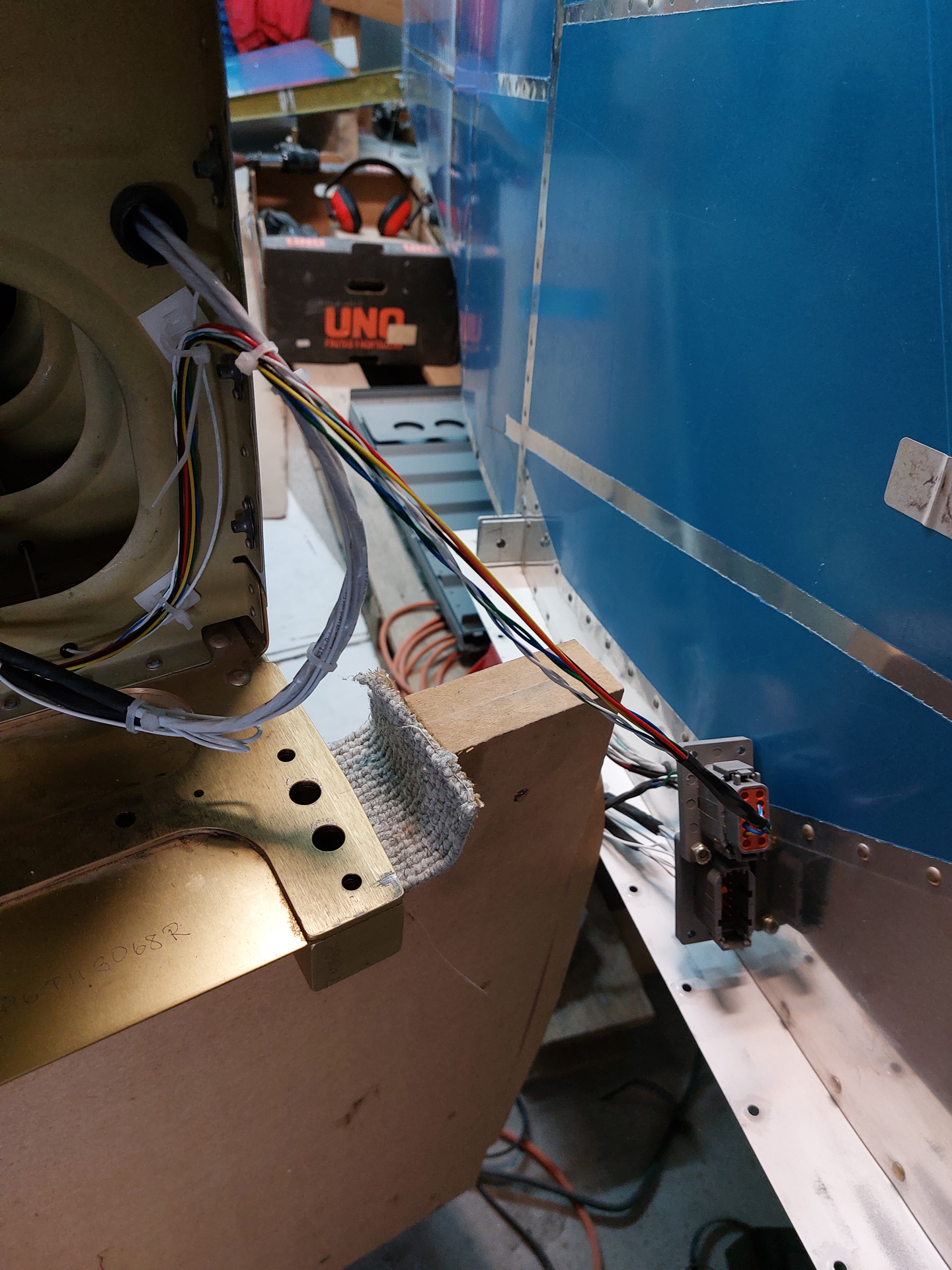
Next I connected the wing wiring for the AP roll servo to the fuselage connector. I'm using deutsch connectors. The the top one in this image is passing the signals and power for the AP servo. Fortunatly my wing cradle is just narrow enough to allow clicking in the connector without having to take the wing out.
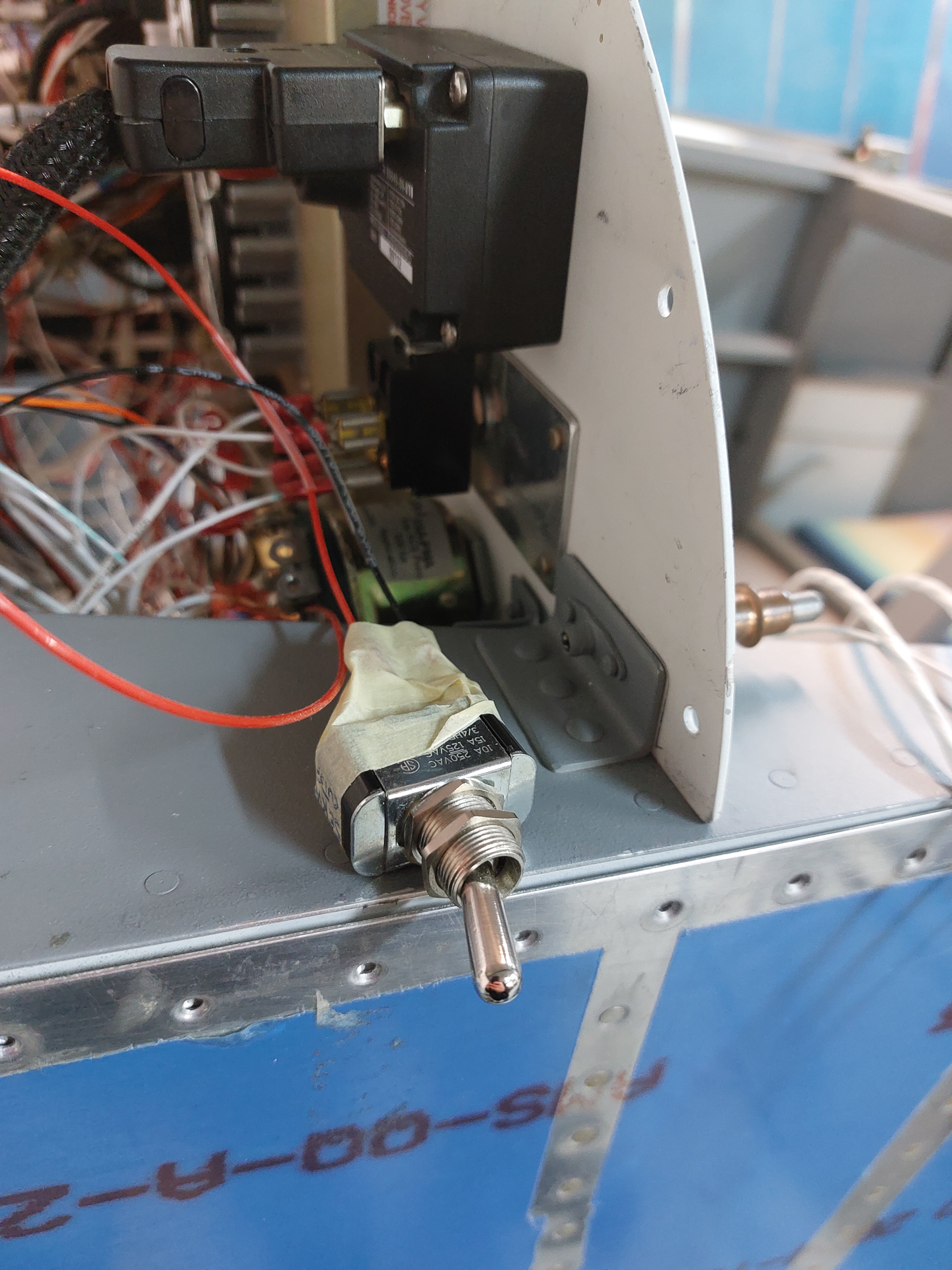
I connected an additional SPST switch that connects to the VPX. Switching this switch to OFF will disable the two power circuits in the VPX that power the autopilot servo's. This acts then as a AP Servo master disconnect switch. Not just the G407 stick AP disconnect function but also a real "take away the power" switch in case something goes seriously south. I couldn't drill the hole yet on the panel but it will be located next to the master trim disconnect switch (that's below the black block from the trig transponder head you see in the image below)
Then I fired up the system the first time with the AP servo's connected., No smoke...

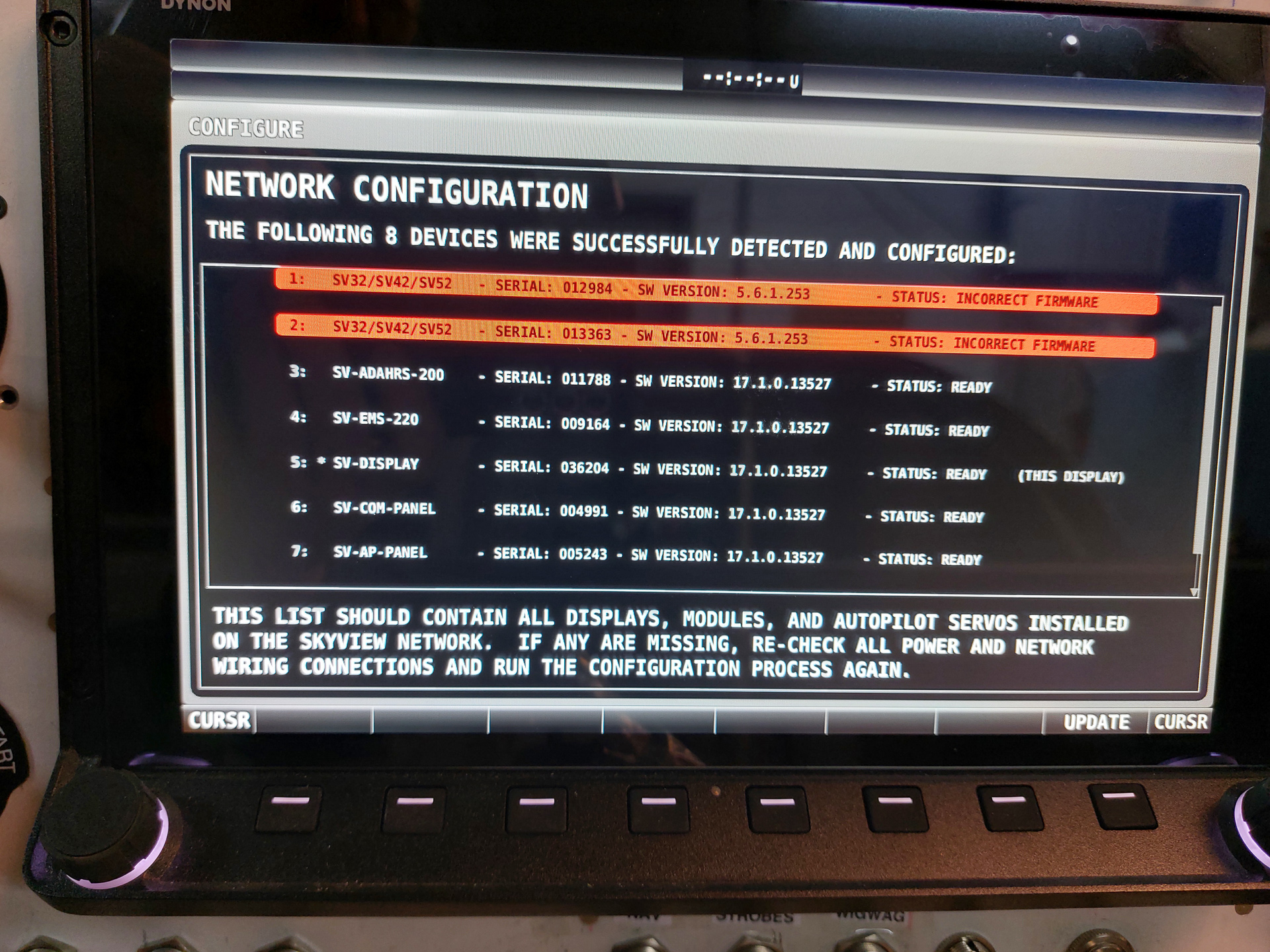
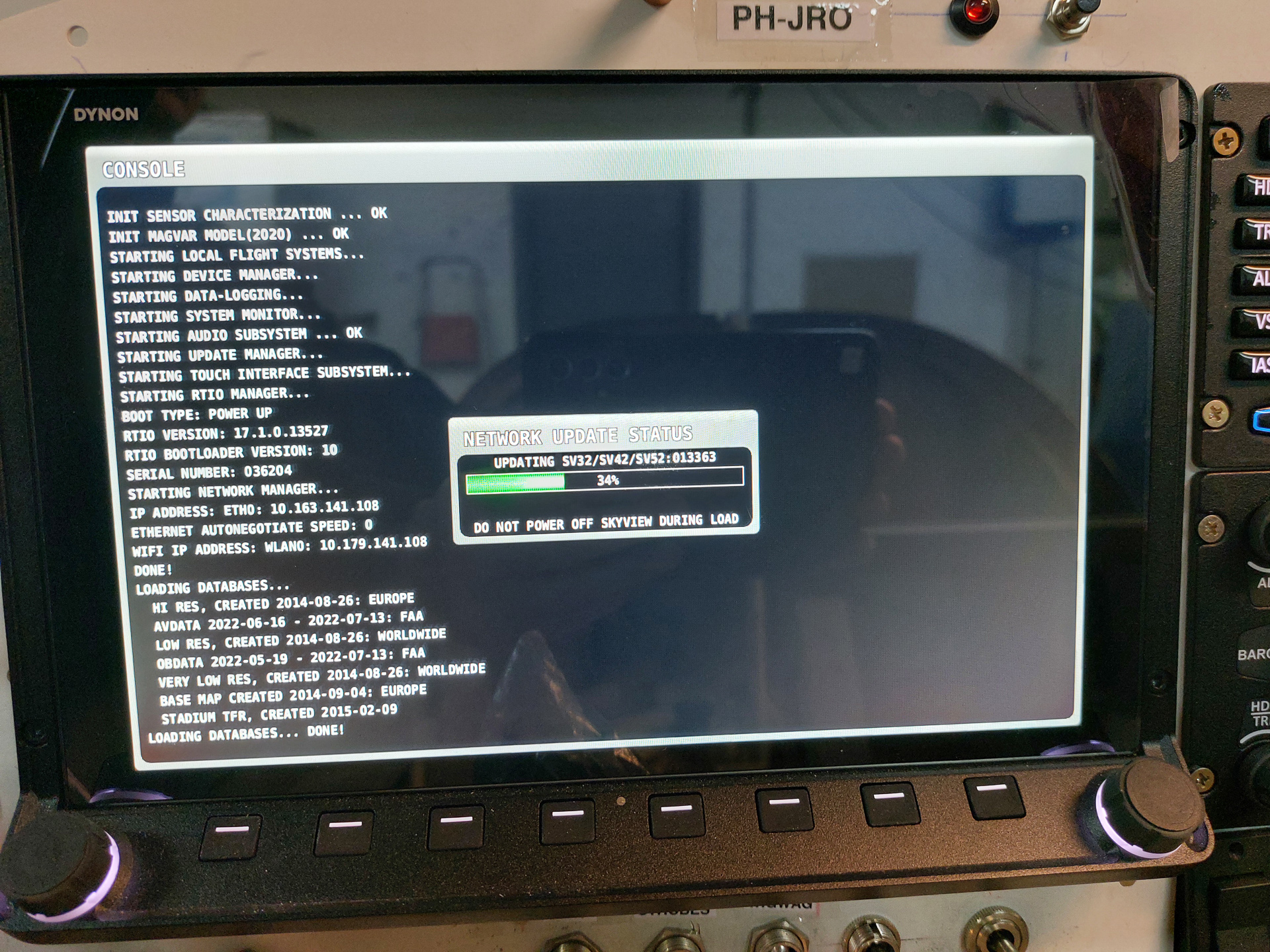
Went into the skyview network detect settings and skyview could find both servo's. Both need a firmware upgrade so that's what I did next.
Firmware upgrades are always tensed moments but it went through without problems.
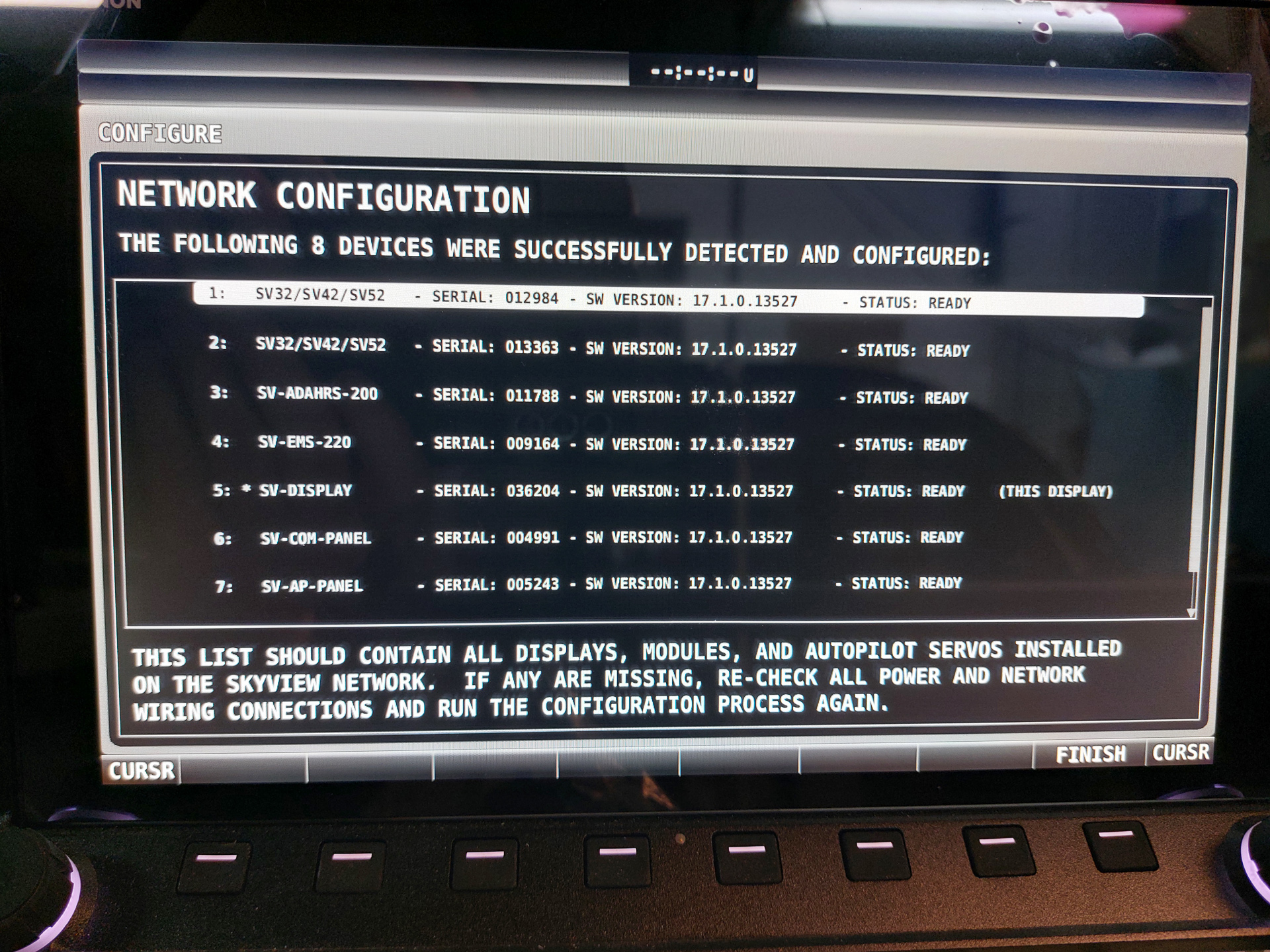
The overview now shows both servo's visible and up to date in the network devices list.